

描述
主控参数:
1、主控芯片参数:主控器为32位ARM处理器,APM32E103系列;主频120MHz,512K程序存储器,128K数据存储器,内置16MB程序存储器,其中2MB作字库使用。
2、主控接口参数:主控器集成了26路数字端口,可接输入输出传感器,数字传感器和I2C传感器(总可扩展52路数字);其中有13路复用模拟端口(A1到A9,C1到C4);复用8路伺服电机端口(A6到A9,C1到C4),最多可接8个伺服电机;3路UART串行端口(与数字端口复用);集成4路马达端口,可接4路编码马达或者4路步进电机,每路马达端口支持输出2路PWM以及编码值捕捉,同时可拓展4路数字IO(即马达端口最多可拓展16路数字IO)。
3、主控器内置2.4寸带触摸TFT液晶屏,分辨率 320*240,色彩不低于65K色;主控器内置蓝牙4.2模块(支持主从模块);内置1个可自定义物理按键,主控器内置电源电压测量模块、音量测量模块(检测灵敏度 -48DB~-64DB)和蜂鸣器(播放频率范围 20-20000Hz);内置蓝牙4.2(支持主从模式);内置EEPROM存储200个,数值范围0~65535。支持磁盘盘程序下载(可存储多个程序);支持磁盘固件升级;主控器电源输入电压范围6.5V到23V ,主控器数字端口最大输出电流:5A;操作系统为CU500全中文操作系统。
4、尺寸参数:96mm*64mm*19mm;
机器参数:
1、六足机器人机身由18个自由度,由18个串行总线舵机组成。
2、机械臂由3自由度组成,为3个串行总线舵机。
3、采用筒状抓取结构,可连续抓取多个4cm小球。
串行总线舵机参数:
1、工作电压:DC 5~12.6V。
2、转动速度:0.16sec/60°(6V)。
3、舵机精度:0.24°
4、转动角度:最大240°(角度可调)
5、参数反馈:温度、电压、角度位置
6、舵机ID号:0~254自由设置
传感器参数:
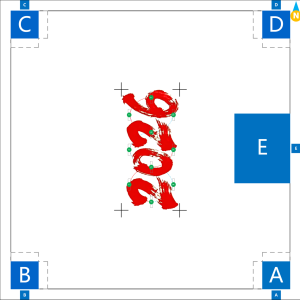
1、图像识别传感器:支持AprilTag Tracking标记码定位追踪功能、支持直线检测追踪功能、支持颜色追踪功能;支持物体追踪功能;
工作电压:5v
主控芯片配置:32位ARM处理器STM32H743VIT6,主频480MHZ、1MB RAM、2MB FLASH
镜头:可调焦镜头
工作温度:-10℃~50℃
模块尺寸:40mm*64mm*24mm(不含镜头尺寸)
传感器接口:6p6c右偏电话座


评价
目前还没有评价